 Fraunhofer-Institut für Experimentelles Software Engineering IESE
Fraunhofer-Institut für Experimentelles Software Engineering IESEUnsere toolbasierte Lösung AutoTestReduction dient der automatischen Generierung logischer Szenarien für die Fahrzeugvalidierung, wobei Fahrzeugaufzeichnungen als grundlegende Datenquelle genutzt werden. Wir stellen uns der Herausforderung, die Relevanz externer Einflüsse, wie z. B. anderer Fahrzeuge, zu bestimmen, und setzen dazu Auto-Codierer ein, die mithilfe von unüberwachtem Lernen automatisch die wesentlichen Merkmale identifizieren. Diese Merkmale werden dann geclustert, um logische Szenarien zu erstellen. Dieser Ansatz erweitert herkömmliche technische Szenarien um datengestützte Erkenntnisse und ermöglicht eine frühzeitige Validierung von Fahrzeugfunktionen durch vollautomatische, KI-basierte Szenariengenerierung.
Automatisierung der Fahrzeugvalidierung mit AutoTestReduction

AutoTestReduction ermöglicht verschiedene Use Cases zur Validierung von autonomen Fahrzeugen:
KI-Automatisiertes Testen von autonomen Fahrzeugen
in Zusammenarbeit mit RevoAI GmbH und Fraunhofer IESE

Screenshot von FastLoop+AutoTestReduction für die szenariobasierte Analyse und Testausführung
Das Tool ermöglicht sowohl Einblicke in Details für die Analyse als auch die parallele Ausführung für Regressionstests. Es identifiziert kritische Ausführungen durch verschiedene Simulationsläufe. Das Clustering von Szenarien definiert verschiedene Ursache-Wirkungs-Beziehungen. Die Wiedergabe und Visualisierung ergänzt die Testberichte.
Problem: Das Testen autonomer Fahrzeuge erfordert die Abdeckung aller kritischen Szenarien sowohl mit Ingenieursmethoden als auch mit Fahrdaten aus der Natur gemäß den Normen ISO 34501-34504.
Lösung: Die RevoAI GmbH und das Fraunhofer IESE entwickelten FastLoop+AutoTestReduction, ein KI-basiertes Werkzeug zur vollautomatischen Szenariengenerierung und -ausführung. Zu den wichtigsten Funktionen gehören Szenariodefinition, unüberwachtes Lernen mit Auto-Encodern, parametrisiertes Testen und verstärkungsbasierte Testoptimierung.
Vorteile: Dies ermöglicht eine effiziente, KI-gesteuerte virtuelle Validierung von autonomen Fahrzeugen und gewährleistet Sicherheit durch optimierte Tests.
Identifizierung von Laufzeitszenarien für autonome Fahrzeuge
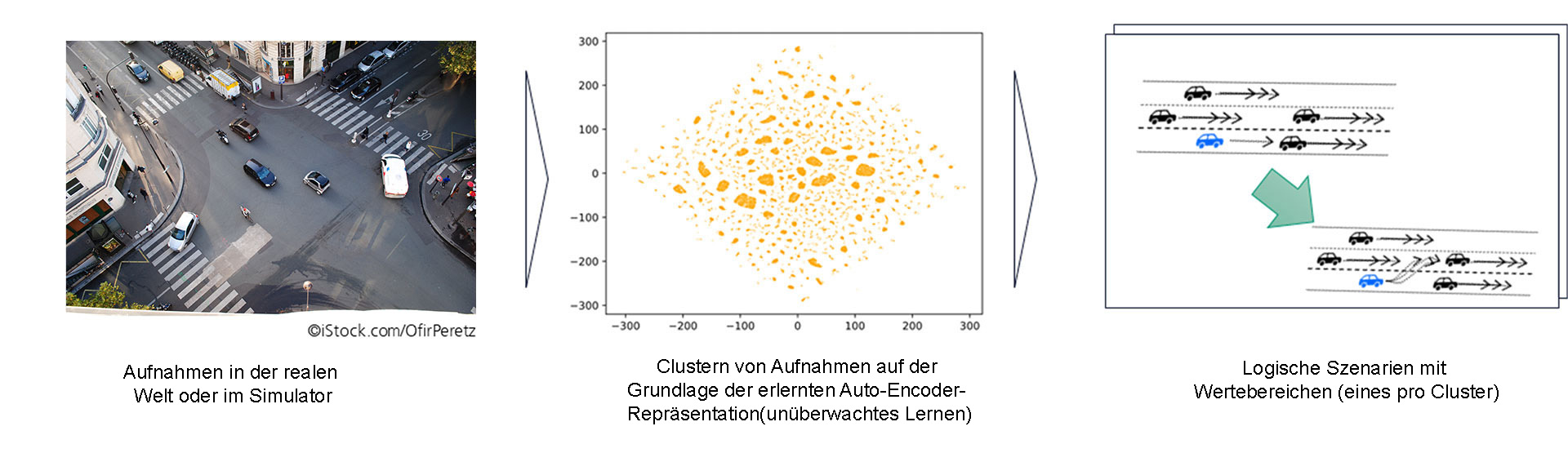
Clustering von Verkehrsszenarien auf der Grundlage von unüberwachtem Lernen mit einem Auto-Encoder. Wenn neue Datensätze als Ausreißer erkannt werden und nicht zu bestehenden Clustern gehören, dann wurde ein neuer relevanter Fall identifiziert.
Problem: Autonome Fahrzeuge sind in realen Umgebungen mit unvorhergesehenen Szenarien konfrontiert, die Feldbeobachtungen erfordern, um neue oder relevante Situationen zu identifizieren. Begrenzter Speicherplatz und begrenzte Bandbreite machen es erforderlich, Laufzeitdaten zu filtern, um festzustellen, ob ein Szenario bekannt ist oder einen Grenzfall darstellt.
Lösung: Das Fraunhofer IESE verwendet Auto-Encoder für die ingenieursunabhängige Erkennung neuer Fahrszenarien, die kein Feature-Engineering erfordern. Dieser KI-gesteuerte Ansatz identifiziert Ursache-Wirkungs-Beziehungen und geht damit über die einfache Erkennung von Anomalien hinaus.
Vorteile: Hersteller können ihre Produktüberwachungsverpflichtungen erfüllen und unerwartete Szenarien während der Fahrzeuglaufzeit automatisch erkennen, ohne dass sie vorheriges Systemwissen benötigen.
Vergleich des Straßenentwurfs für die Einhaltung der Operation Design Domain (ODD)
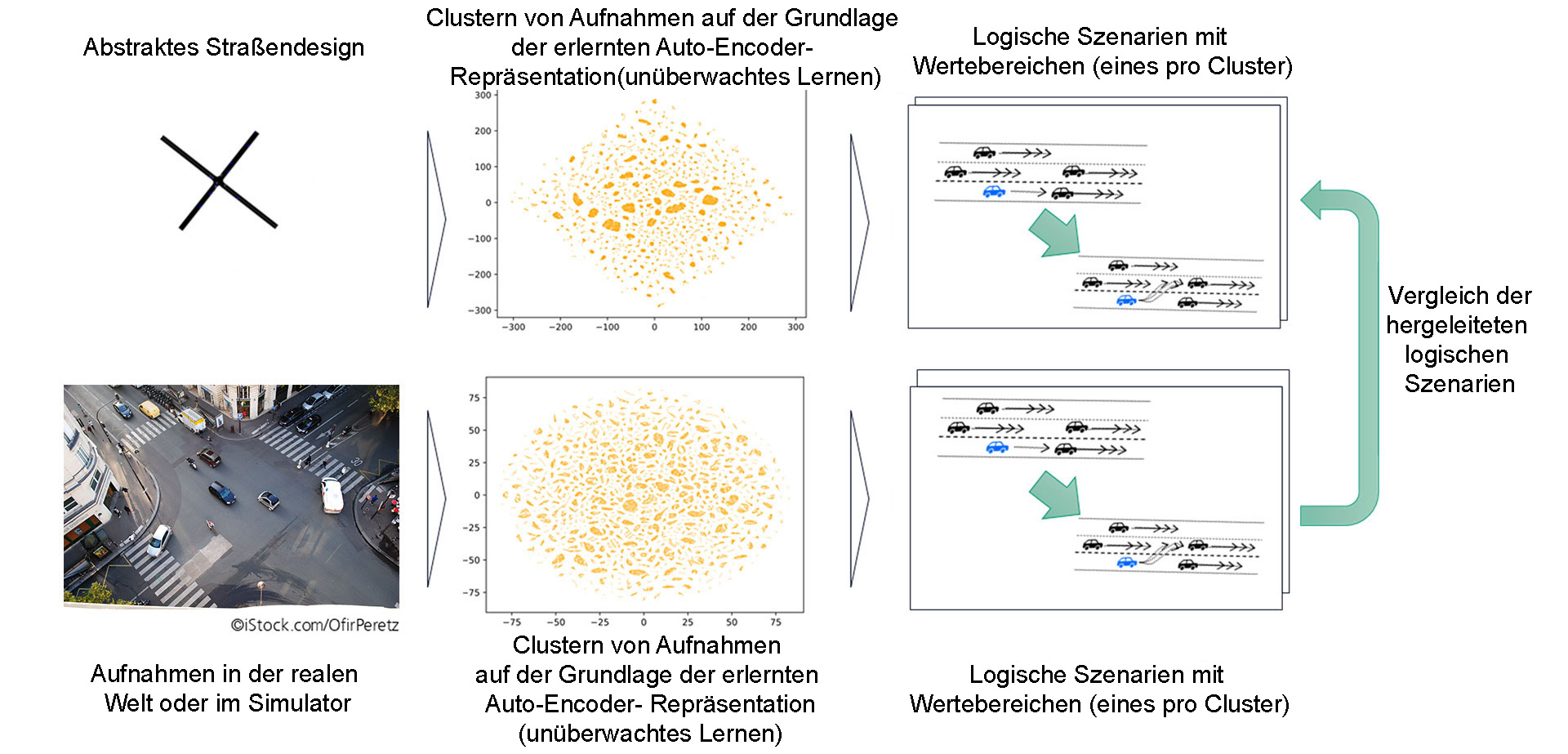
Clustering von Verkehrsszenarien auf Basis von unüberwachtem Lernen mit einem Auto-Encoder für zwei Kreuzungen. Die Cluster, die nicht von einer Kreuzung zur anderen passen, bestimmen die fehlenden oder zusätzlichen Verhaltensinteraktionsmöglichkeiten. Wenn die Cluster übereinstimmen, weisen beide Kreuzungen die gleichen Verhaltensinteraktionen der Verkehrsteilnehmer auf.
Problem: Bei der Definition einer Operational Design Domain (ODD) für autonome Fahrzeuge muss sichergestellt werden, dass die realen Straßendesigns und das Verkehrsverhalten mit den während der ODD-Entwicklung definierten abstrakten Designs übereinstimmen. Die Komplexität der Interaktionen in verschiedenen Straßendesigns macht es schwierig, Szenarien effektiv zu vergleichen.
Lösung: Das Fraunhofer IESE setzt Auto-Encoder ein, um mögliche Verhaltensinteraktionen innerhalb verschiedener Straßendesigns automatisch zu identifizieren. Dieser unüberwachte, entwicklungsunabhängige Ansatz vergleicht die Interaktionen zwischen verschiedenen Straßendesigns und hebt sowohl Gemeinsamkeiten als auch Unterschiede hervor.
Vorteile: Hersteller von autonomen Fahrzeugen können sicherstellen, dass reale Umgebungen mit ihren ODD übereinstimmen, was die Sicherheitsvalidierung unterstützt. Straßendesigner können ihre Entwürfe optimieren, indem sie Verhaltensinteraktionen und mögliche Ursachen für unerwartetes Verhalten analysieren.
Veranstaltungshinweis: Simulation, Testing & Validation
Besuchen Sie uns am 12. September 2024 bei unserem Vortrag auf der SIMULATION, TESTING & VALIDATION for Automated Driving 2024