Within the collaborative framework, Fraunhofer IESE contributed to three key aspects of the system development. The primary scientific contribution involves the integration of dynamic safety mechanisms to enhance the performance of the target system by employing realistic, human-like assumptions regarding pedestrian behavior at crossings during runtime. Initially, to ensure safety, the system adopts a static, worst-case scenario parameterization of pedestrian behavior, which unrealistically assumes that pedestrians could suddenly move at speeds comparable to Those of an Olympic gold-medalist. This conservative approach does not align with typical expectations of human drivers, who assess pedestrian behavior more dynamically.
Fraunhofer IESE helped to enhance the system by analyzing and modeling pedestrian behavior from a human driver's perspective, thereby enabling the system to adjust safety parameters dynamically to better match real-time situations. This approach makes the autonomous system's responses more intuitive and human-like, which in turn enhances acceptance among operators and passengers as the system’s behavior resembles that of a human driver.
The significant enhancement in system performance achieved by utilizing safe yet more realistic safety parameters for specific situations is accomplished through the "Situation-Aware Dynamic Risk Assessment" (SINADRA) method developed by Fraunhofer IESE. This method is complemented by Hitachi, Ltd.'s "Symbiotic Safety" approach. Together, they provide a robust framework for improving the interaction between autonomous vehicles and pedestrians in dynamic environments.
A secondary contribution centers on the adaptation of Safety of the Intended Functionality (SOTIF). Fraunhofer IESE’s own "Conditional Safety Certificates" (ConSerts) technology empowers the system to dynamically adapt to SOTIF faults emerging at runtime. This capability ensures that the system can accurately and safely assess its own operational capabilities. Furthermore, any capabilities essential for the implementation of other safety technologies in this collaboration that are impacted are addressed through system adaptation. This process facilitates a robust and reliable application of dynamic runtime risk management strategies by allowing appropriate system adaptations.
Lastly, with the help of the Digital Dependability Identities (DDI) technology, these models were transformed into software executables and integrated into the target system architecture of the autonomous shuttle bus and the BRT system.
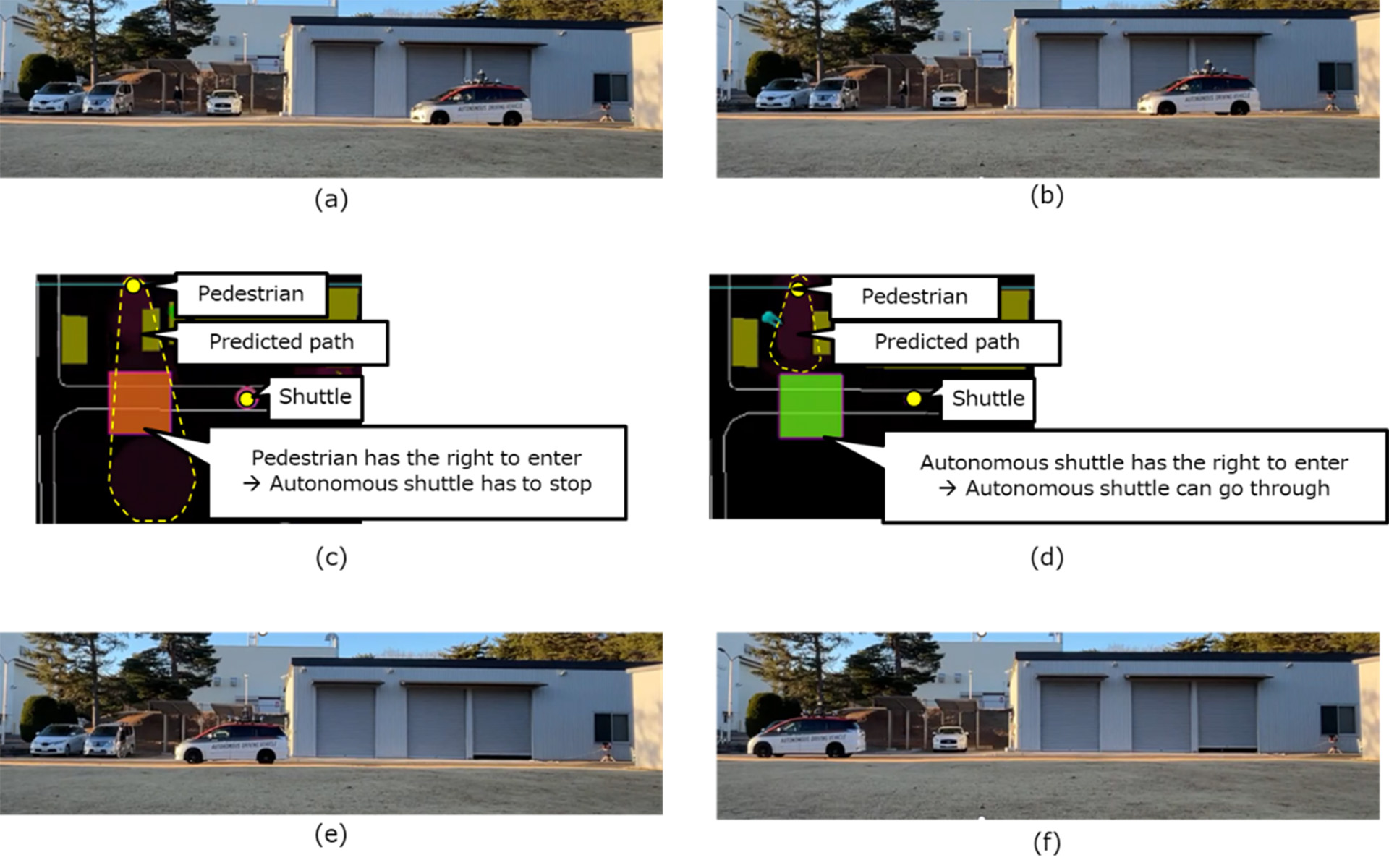
The overall system including the different technologies was successfully evaluated for pedestrian crossing situations in simulations as well as on a real system in a closed testing area at Hitachi Campus, Japan. The evaluation showed that system performance improved, so that now the system does not need to wait at a pedestrian crossing every time it encounters a pedestrian, as illustrated in the following figure:
 Fraunhofer Institute for Experimental Software Engineering IESE
Fraunhofer Institute for Experimental Software Engineering IESE